| Autoguider |
|||
| |
|||
|
|
|||
Autoguiding - viele fragen sich: Was ist das überhaupt? Um das Funktionsprinzip von Guiding bzw. Autoguiding zu verstehen, muss man folgende Hintergründe kennen: Bei der Astrofotografie kommt es bei langbelichteten Aufnahmen besonders darauf an, dass das aufzunehmende Objekt möglichst über die komplette Belichtungszeit exakt an Ort und Stelle gehalten wird. Ansonsten würden Sterne nicht mehr punktförmig abgebildet, sondern zu kleinen Strichen auseinandergezogen werden. Das Problem dabei ist, dass sich die Sterne, bedingt durch die fortwährende Erddrehung, während der Belichtungszeit weiter bewegen. Um dies auszugleichen, muss die Montierung die Aufnahmekamera so genau wie möglich auf die (scheinbare) Sternbewegung nachführen. Nun ist es so, dass
auch die allerbesten Montierungen mit gewissen Fertigungstoleranzen
behaftet sind. Insbesondere die Schnecke und das Zahnrad des Rektaszensionsantriebes
sind davon betroffen. Winzige Unregelmäßigkeiten lassen
die Nachführgeschwindigkeit minimal schwanken. Das Ergebnis würde im schlimmsten Fall dann so aussehen: |
|||
 |
|||
| Diese
Aufnahme der Plejaden wurde ca. 120sec lang belichtet, wobei die
Montierung sehr ungenau nachführte. Die Sterne blieben dabei
während der Aufnahme nicht am exakt selben Ort auf dem Chip,
sondern wanderten hin und her. Ganz ohne Nachführung wären die Striche aber noch wesentlich länger!
|
|||
| |
|||
Wie kann das Problem gelöst werden? Im Prinzip
muss eine genaue Kontrolle der Nachführung
stattfinden. Es muss darauf geachtet werden, dass ein Referenzstern
(sog. Leitstern) während der gesamten Belichtungsdauer exakt
an der selben Stelle im Bildfeld verweilt. |
|||
Die einfachste
Methode besteht darin, parallel zum Aufnahmeinstrument ein kleines,
zweites Fernrohr zu montieren, mit dem der Fotograf den Leitstern
per Auge durch ein Fadenkreuzokular immer zentriert hält. Dieses
zusätzliche Teleskop wird Leitrohr
genannt. Alternativ
kann die Nachführkontrolle mit einem sog. Off-Axis
Guider (OAG) vollzogen werden. Dabei wird kurz vor
der Kamera seitlich am Okularauszug durch ein Prisma ein kleiner
Teil des Lichtes "abgezapft". In diesem Bereich findet
sich meist ein geeigneter Leitstern. Der Vorteil davon ist, dass
der Leitstern vom selben Lichtpfad stammt, wie die eigentliche Aufnahme.
Eventuelle Abweichungen
durch ein zu labil montiertes Leitrohr werden so vermieden. |
|||
| |
|||
Aus diesem Grund hat
man sich überlegt, wie man die lästige aber notwendige
Nachführkontrolle vereinfachen und automatisieren könnte. Die Vorgehensweise
bleibt die selbe: Ein Leitstern muss erfasst werden, die Position
wird kontrolliert und bei einer Abweichung wird die Montierung
entsprechend nachgeregelt. |
|||
Das
menschliche Auge wird durch eine möglichst empfindliche Kamera
ersetzt: |
|||
 |
|||
1)
Guidingkamera |
|||
|
|||
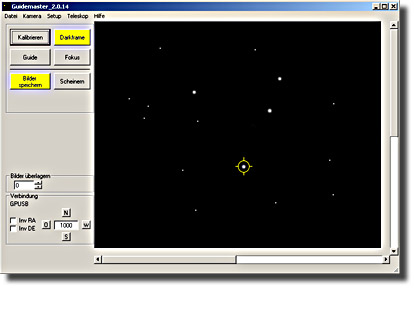
| ... und das menschliche Gehirn wird durch eine geeignete Autoguider-Software und einen PC ersetzt: | |||
|
|
|||
| Software: Guidemaster | |||
| Um
den PC mit dem Teleskop zu verbinden, gibt es verschiedene Ansätze.
Grundsätzlich besteht aber auch die Möglichkeit, mit einer speziellen stand-alone CCD-Guidingkamera ganz ohne PC-Unterstützung zu arbeiten. |
|||
 |
|||
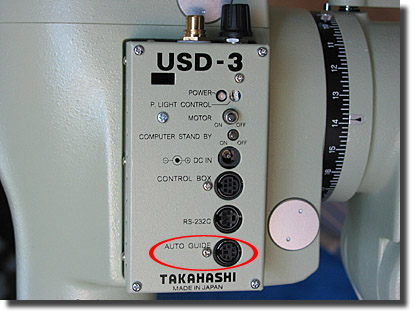
| Autoguideranschluss an der Original Takahashi EM-200 Steuerung | |||
 |
|||
| Autoguideranschlüsse
an der FS2-Steuerung (links RJ12, rechts SUB-D) |
|||
 |
|||
USB-Interface
von shoestring-astronomy
mit internen Optokopplern. Es sind auch Interface-Boxen mit klassischen Relais erhältlich. Diese verursachen aber während den Schaltvorgängen Klappergeräusche. |
|||
| So wird das Ganze im Beispiel angeschlossen: Nachdem
die Guidingsoftware auf dem PC installiert wurde, muss das USB-Interface
mit dem PC verbunden werden. Dieses Interface stellt die Verbindung
von PC und Montierung her - es dient quasi als Sprachübersetzer
zwischen PC und Montierung. |
|||
| Ground | Masse | ||
| R.A. + | Rektaszension schneller | ||
| R.A. - | Rektaszension langsamer | ||
| Dec + | Deklination nach Norden | ||
| Dec - | Deklination nach Süden | ||
Es
hat sich ein quasi Standard namens "ST-4" herausgebildet
(die ST-4 ist eine autarke Autoguiderkamera von SBIG). Auch
eine gewisse Drift in der Deklination, verursacht durch nicht optimale
Einnordung der Montierung, kann der Autoguider ausgleichen.
|
|||
Kalibrierung
der Software: Beispiel:
Die Montierung dreht sich ein Stück nach Westen, der Leitstern
auf dem Monitor bewegt sich dabei aber nach oben, weil die Guidingkamera
vollkommen willkürlich montiert wurde. Auf dem Monitor wäre
dann einfach oben = Westen. Man muss
dabei nur darauf achten, dass die Montierung in einer einstellbaren
Zeit Wurden
alle 4 Richtungen ausgetestet und bewertet, ist das Programm bereit
für das eigentliche Guiding. Die Kalibrierung
muss nur dann neu erfolgen, wenn die Einbauposition (Drehwinkel)
der Guidingkamera verändert wurde. |
|||
Fazit: Es soll
nicht verschwiegen werden, dass es noch viele andere Hardware-Lösungen
als die oben dargestellten Geräte gibt. Die beschriebene Konfiguration
funktioniert mit meiner Ausrüstung sehr zufriedenstellend.
|
|||